Les mécanismes d'exécution
Processus, ordonnancement
Jérôme David - Florian Rodriguez
1. Introduction
- La notion de processus est centrale
- C'est une abstraction d'un programme en cours d'exécution
- Elle permet de simuler des opérations concurrentes même si il n'y a qu'un seul CPU
- Elle fournit une vue virtuelle de la mémoire, des CPU (plusieurs CPU virtuels avec un seul CPU physique)
- Elle permet de donner « l'illusion » que plusieurs programmes s'exécutent en même temps (la multiprogrammation)
- Programme != processus
- Un programme est une entité passive (un fichier exécutable)
2. Principes de la multiprogrammation
- Il n'y a qu'un seul processus en cours d'exécution à la fois (si 1
seul processeur)
- Un processus n'est pas exécuté en une seule fois
- On doit être capable d'enregistrer l'état d'un processus pour y revenir plus tard
- Il faut des stratégies pour répartir l'allocation du processeur aux processus
3. Modèle de processeur
- Instructions = opérations
- Accès à la mémoire, opérations arithmétiques & logiques, contrôle (branchements)
- Registres (mémoire interne du processeur)
- Accumulateur : pour stocker le résultat
- Registre d'état (PSW) : zéro, retenue, dépassement, signe, etc.
- Registre d'instruction (IR) : instruction en cours
- Compteur ordinal (PC) : adresse de la prochaine instruction à charger
- Pointeur de pile (SP) : prochain emplacement dispo dans la pile mémoire

4. Le modèle de processus
Chaque processus possède un état
- La valeur du compteur ordinal (PC)
- Le contenu des registres
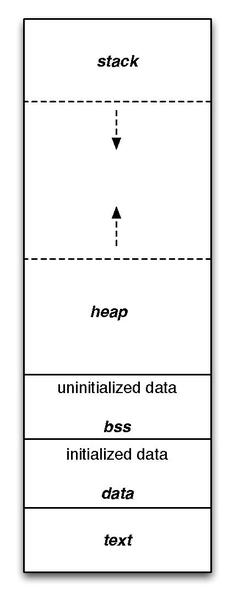
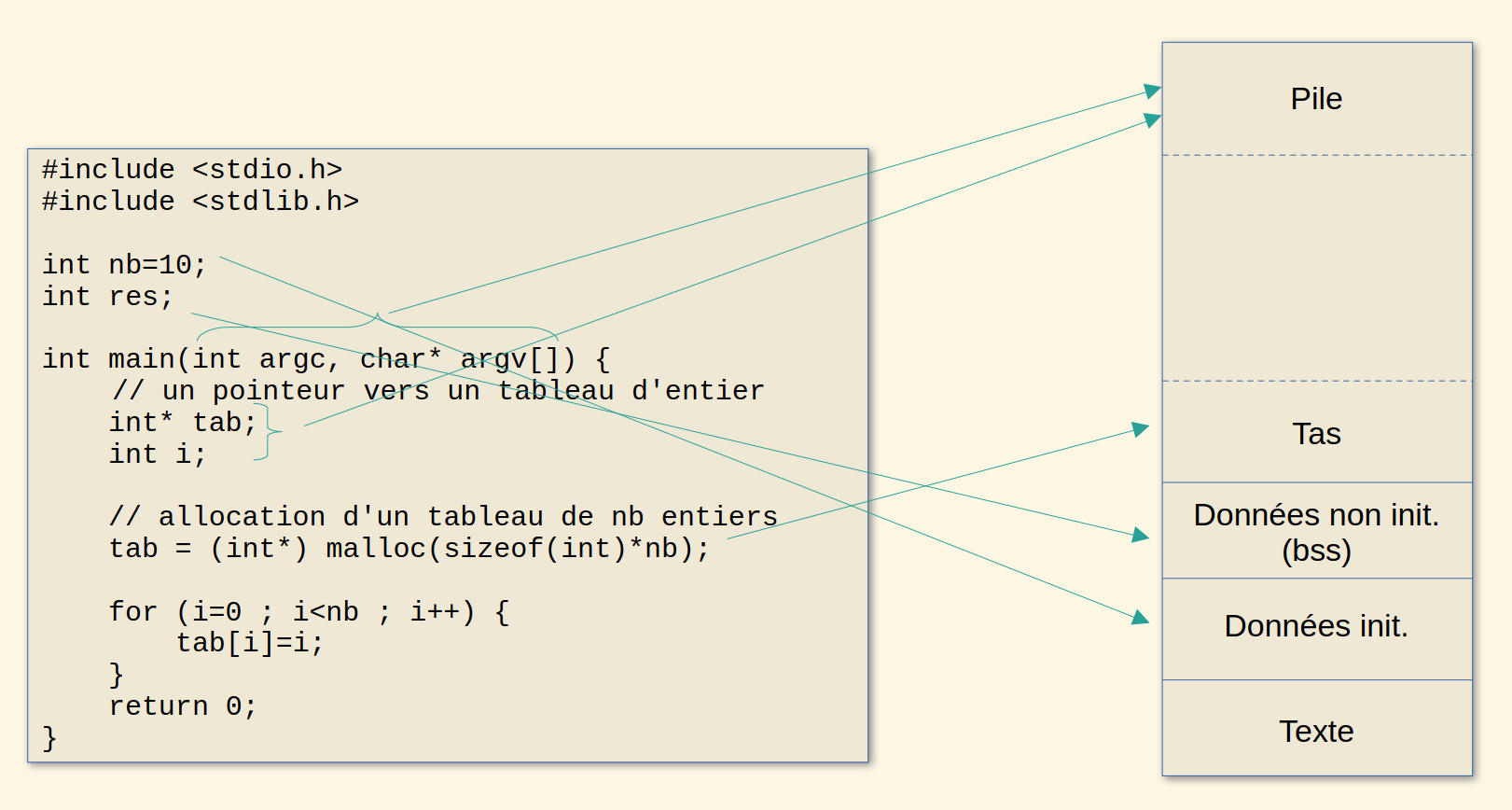
Et une image mémoire (segment de données)
- stack (La pile) : stockage temporaire pour les param de fonction, retour, variables locales
- heap (Le tas) : mémoire allouée dynamiquement
- data et bss Les variables globales
- text Code exécutable
Source images: Wikimedia Commons CC BY-SA 3.0
5. Exemple
6. Le cycle de vie d'un processus - ses états

7. Bloc de contrôle de processus - PCB
- Contient toutes les infos permettant de démarrer ou redémarrer un
processus
- sauvegardé à chaque passage « actif » vers « prêt » ou « bloqué »
- restauré au passage « prêt » vers « actif »
- Process bloc control (PCB) :
- L'identifiant du processus (PID), du parent (PPID), de l'utilisateur (UID)
- Les valeurs des registres processeur
- Le compteur ordinal (PC)
- Le pointeur de pile (SP)
- L'espace d'adressage (mémoire virtuelle)
- La listes de descripteurs de fichiers (fichiers ouverts)
- Information d'ordonnancement
- … (ca dépend des systèmes)
8. La création des processus
- Cela revient à « lancer un programme »
- Par clic ou en tapant une commande dans le shell
- Certains processus sont lancés au démarrage
- La création du processus est une opération système (exécutée en mode
noyau)
- Réalisée par l'appel système
fork()sous Unix
- Réalisée par l'appel système
9. La création des processus (cont.)
- Chaque processus est créé par un père
- Hiérarchie de processus (vu précédemment)
- L'appel
forkcréé un processus fils, clone du processus père qui l'exécute- Même image mémoire, etc.
- Par contre, ils ne partagent rien
10. Exemple de fork
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
int main() {
pid_t pid = fork();
if (pid == -1) {
// Il y a une erreur
perror("fork");
return EXIT_FAILURE;
} else if (pid == 0) {
// On est dans le fils
printf("Mon PID est %i et celui de mon père est %i\n", getpid(), getppid());
} else {
// On est dans le père
printf("Mon PID est %i et celui de mon fils est %i\n", getpid(), pid);
}
return EXIT_SUCCESS;
}
11. Terminaison d'un processus
- Un processus se termine
- Lorsqu'il a exécuté sa dernière instruction
- Par appel à la fonction système
exit(n)ou n est le code de retour - La terminaison d'un processus libère toutes les ressources du processus
- Le code de retour est envoyé au processus père qui le récupère via
l'appel système
wait(&nb)- Entre le moment où le processus est terminé et le moment où la
fonction wait() du père est appelée, le processus est considéré
comme un zombie
- Il n'a plus d'image mémoire mais il a encore un PCB en mémoire (où est stocké) le code de retour
- Entre le moment où le processus est terminé et le moment où la
fonction wait() du père est appelée, le processus est considéré
comme un zombie
12. La gestion de l'exécution
- Il faut pouvoir arrêter et redémarrer un processus
- Commutation de contexte, allocation du CPU
- Rôle du « dispatcher »
- Il faut gérer des files d'attentes
- Pour l'accès au CPU ou autres périphériques
- Réaliser une stratégie d'ordonnancement du CPU au processus prêts
- Rôle du « scheduler »
13. Commutation de contexte
- Pour passer d'un processus à un autre
- Principe (simplifié) :
- Sauvegarde du PCB du processus à interrompre
- Chargement du PCB du processus à exécuter
- C'est généralement réalisé via des interruptions
- Un mécanisme matériel du processeur
- Une commutation prend un certain temps…
- C'est la latence de commutation (dispatcher latency)
14. Les files d'attentes

15. L'ordonnancement
- C'est le rôle du scheduler
- Il doit choisir un processus parmi tous ceux qui sont prêts et lui allouer le CPU
- Il existe plusieurs stratégies
- Non Préemptif
- Laisse un processus actif tant qu'il ne bloque pas (état attente) ou qu'il n'est pas terminé (ou que le processus laisse volontairement passer son tour)
- Utilisé dans les systèmes en mode « batch »
- Préemptif
- Laisse un processus dans l'état actif un temps maximum fixé.
- Nécessite d'avoir une interruption d'horloge
- Utilisé dans tous les systèmes d'exploitation interactifs « modernes »
- Non Préemptif
16. Buts des algorithmes d'ordonnancement
- L'équité entre les processus
- Maximisation
- de l'utilisation du CPU
- du rendement (tâches terminées / unité de temps)
- Minimiser
- Les temps d'exécution des tâches
- Le temps d'attente (dans l'état prêt)
- Le temps de réponse (surtout dans les systèmes interactifs)
17. Critères de qualité de l'ordonnancement
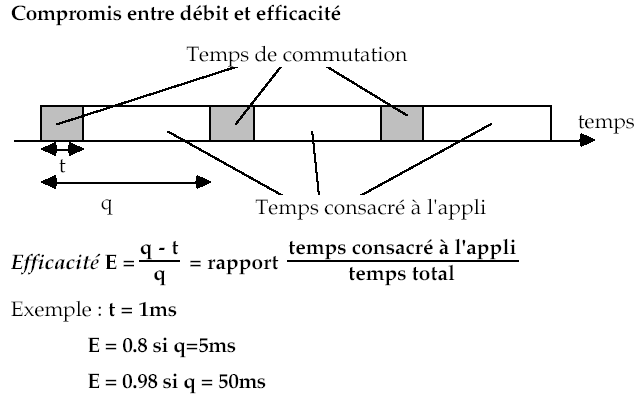
- Efficacité/Rendement: le maximum de temps doit être consacré à l'application
- Temps de réponse: le plus faible possible (lié au temps de latence)
- Impartialité: partage équitable entre tâche
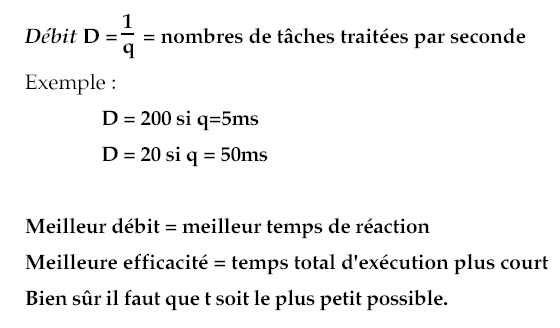
- Débit: le plus de tâches possibles dans un temps donné
18. Quelques algo d'ordonnancement (non préemptifs)
- Premier arrivé, premier servi (FCFS - First Come First Served)
- Facile à implémenter, mais pb lorsque qu'une tâche prend trop de temps…
- Le plus court d'abord (Shortest Job First)
- Ca serait bien mais on ne sais pas a priori le temps que va mettre un processus à s'exécuter…
- Variante : le plus court restant.
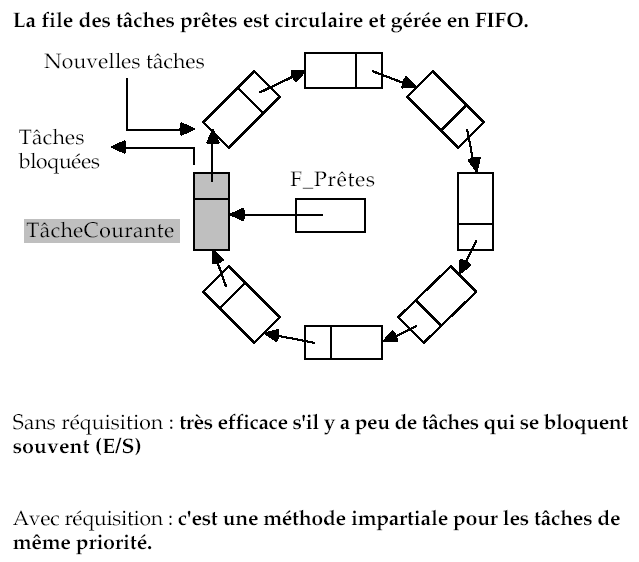
19. Le Tourniquet
- Round Robin
- FCFS en version préemptive
- On change de processus après un certain temps
- Quantum de 10ms à 100ms
20. Le Tourniquet - choix du quantum
21. La priorité pure
- Chaque processus est associé à une priorité
- L'ordonnanceur choisi la tâche la plus prioritaire
- PB de monopolisation du CPU
- On décrémente la priorité à chaque interruption d'horloge
- Le processus laissera donc sa place au bout d'un certain temps
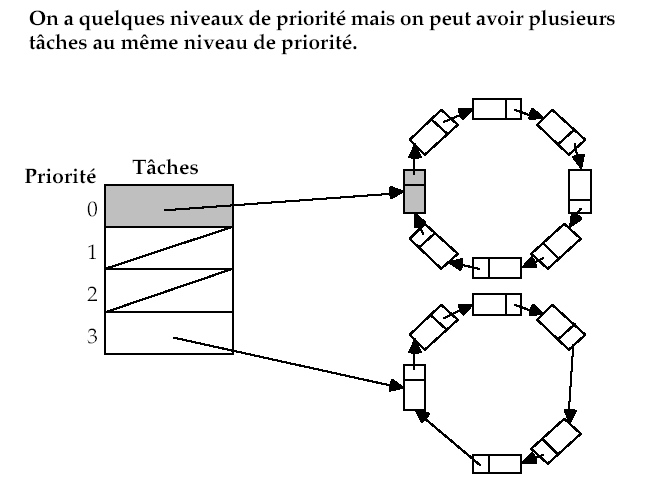
22. Files d'attente multi-niveau
Approche mixte : tourniquet + priorité